Dr. AHMAD NAJMUDDIN IBRAHIM
Mechatronics@Universiti Malaysia Pahang
Research
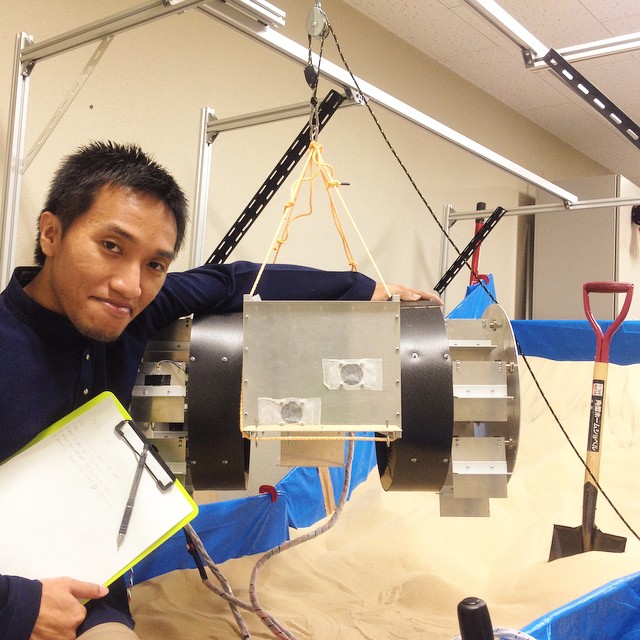
Anchor-like Assistive Grousers for Wheeled Rover (collaboration with Ibaraki University, Japan)
Typical rovers with conventional fixed grousers attached to the wheels are prone to get stuck in unconsolidated sandy dune inclines due to the sinking of the wheels in the sand. This is caused by the rotating motion of the grouser which displaces the sand from under the wheel toward the back, embedding the wheel.
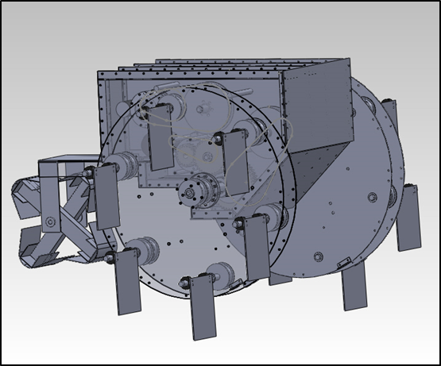
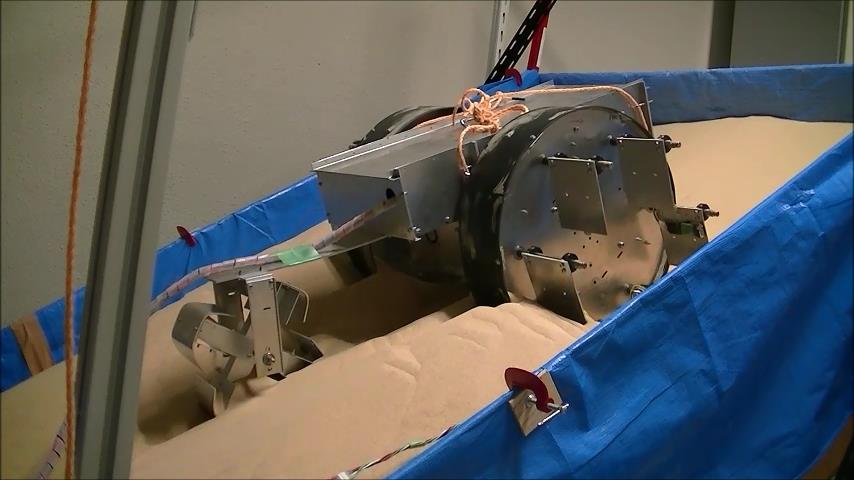
We developed a new concept of an assistive grouser attached to the side of a conventional rover wheel to aid in climbing a steep slope of sand with minimal sand movement and sinkage into the sand. The assistive grousers are able to autonomously maintain a uniform angle relative to the rover body independent of the rotation of the wheels by devising its mechanical design. When the wheel is turned, the assistive grousers penetrate the sand slope surface at a constant angle of attack without additional control. The assistive grousers act as an anchor, provide additional traction to the wheel, and by maintaining a uniform grouser angle instead of a rotating motion, also assists in pulling the grouser out of the sand smoothly without moving sand towards the back of the wheel.
Experimental results show that for slope angle of 0 to 30 degrees, the rover equipped with the proposed assistive grousers produce significantly smaller sinkage and current consumption compared to the conventional grouser attached wheel rover in the comparison tests. The assistive grousers were also proven to be able to assist in recovering the mobility of the wheel after the wheel is embedded into the sand.
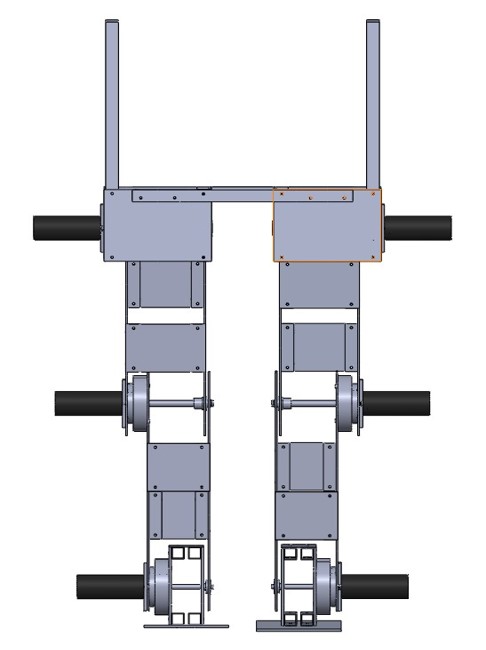
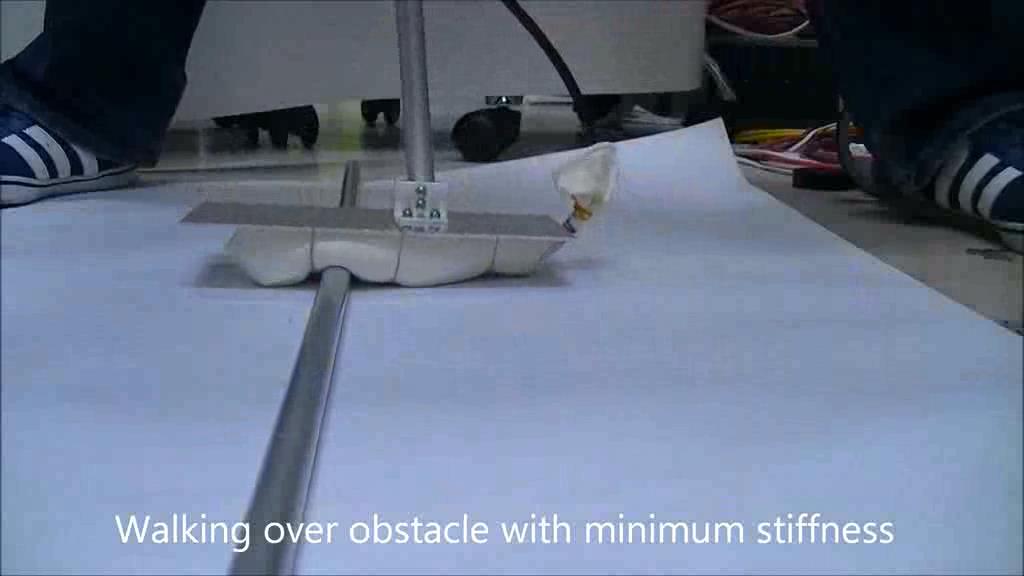
Stiffness Variable Foot Sole for Bipedal Robots
This research aims to realize the walking of bipedal robot on an uneven surface by using a novel foot sole mechanism which utilizes the jamming transition effect of granular material enclosed in an air tight bag. The stiffness-variable property of the mechanism according to the internal air pressure of the bag was investigated, and a stiffness control test had been carried out to determine the speed and smoothness of the change in stiffness of the mechanism. A bipedal walking robot had been developed for use during actual walking experiments using the proposed foot sole mechanism.