Dr. AHMAD NAJMUDDIN IBRAHIM
Mechatronics@Universiti Malaysia Pahang
Educational Background
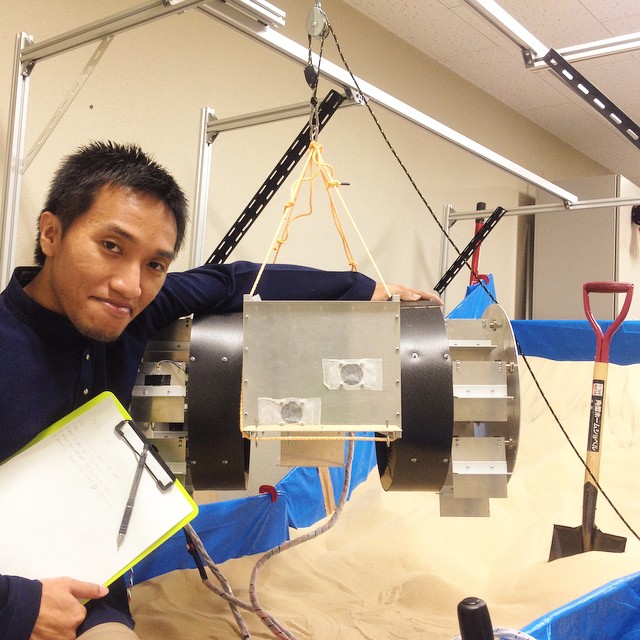
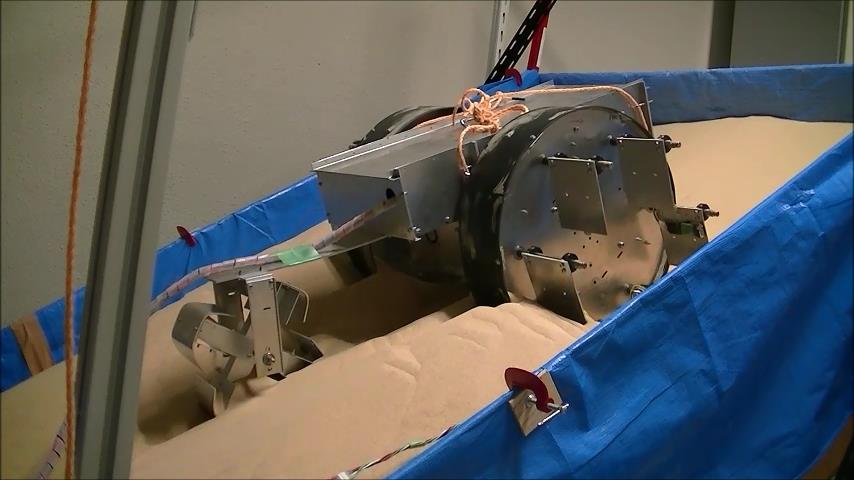
Doctor of Engineering, Majoring in Industrial Science
2013–2017 Ibaraki University Ibaraki, Japan
Thesis title: “Development of Assistive Anchor-Like Grousers for Improving Travel Performance of Wheeled Rover on Unconsolidated Sand Inclines”.
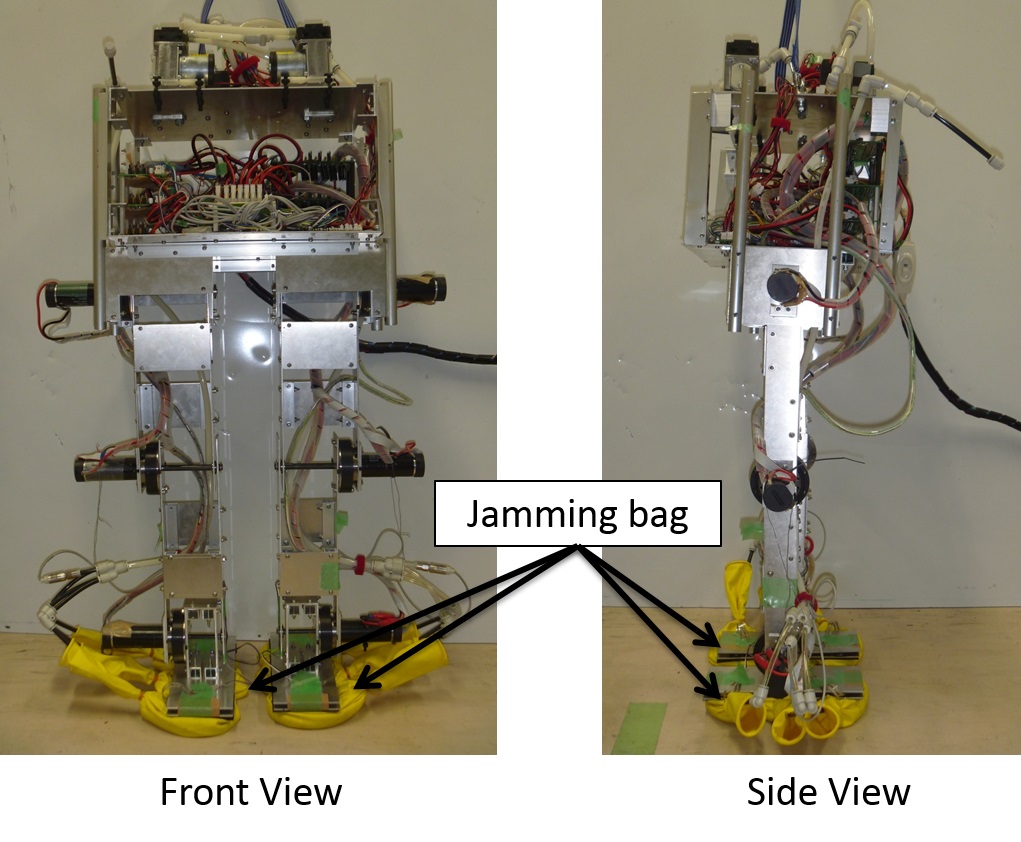
Master of Engineering, Majoring in Intelligent Systems Engineering
2011-2013 Ibaraki University Ibaraki, Japan
– Thesis title: “Experimental Development of Stiffness Adjustable Foot Sole for Use by Bipedal Robots Walking on Uneven Terrain”.
– Completed the Nuclear Engineering Educational Certificate Program: coursework includes Nuclear Energy Engineering, Radiation Physics and Engineering, Nuclear Engineering Laboratory, Atomic Science and Ethics.
Bachelor of Engineering, Majoring in Intelligent Systems Engineering
2007-2011 Ibaraki University Ibaraki, Japan
– Graduation research title: “Kinematics Measurement of Snake Locomotion using Stereo Vision and Markers”.
– Coursework includes Industrial Mechanics, Control Engineering, Modeling for Systems, Mechanical Engineering Design, System Optimization, Actuator, Microcomputer Control, Intelligent Information Processing, Applied Network System, Digital Manufacturing.
