My main research interest is on the autonomous vehicle navigation and rehabilitation robotics. Any collaboration with respect to the respective fields are welcomed. Below are the list of the on-going research under my laboratory, Intelligent Robotics and Vehicle Laboratory (IRoV) which is a sub-research cluster under IMAMS laboratory.
1. Path Planning Algorithm for Autonomous Ground Vehicle
This research is mainly focus on the path planning algorithm performance on the autonomous vehicle navigation. The map is built using sensors and the algorithm is developed to calculate the best optimized path generation for the autonomous vehicle.
2. Vehicle stability analysis for the autonomous vehicle control
This research is mainly focusing on the performance and stability of the autonomous vehicle under disturbance from the vehicle dynamics and road profile.
PIC: Baarath Kunjuni
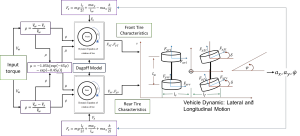
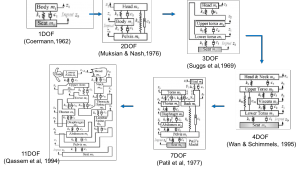
3. Predictive Biodynamic Model Of Human Driver And Vehicle Towards The Effect Of Vertical Vibration
This research is to develop a predictive biodynamic human drive and its effect to the vertical vibration when driving.
PIC: Nurul Afiqah Zainal
4. List of Research and Supervision:
- Nurul Afiqah Zainal (PhD): Predictive Biodynamic Model Of Human Driver And Vehicle Towards The Effect Of Vertical Vibration
- Baarath Kunjuni (Master) : Threat Assessment for Nonholonomic Electric Vehicle by Considering the Effect of Weight Distribution on Vehicle Stability
- Lim Hue Yue (FYP 2017): Trajectory Tracking Analysis of Planar End-Effector Upper Limb Rehabilitation Device
- Ahmad Aftar Mukhriz Amir Khan (FYP 2017)
- Abdul Haleem Bin Habeeb Mohamed (FYP 2017)
- Lok Jia Jun (FYP 2017)
- Azizol Ikram (FYP 2016) : Mobile robot localisation using wifi localisation techique.
- Maccolin Anak Micheal (FYP 2016): Mobile robot obstacles avoidance using fuzzy logic technique.
- Ling CL (FYP 2016) : Robotic kit development for education
- Nabil Zhafri Nasir (FYP 2015): Kalman Filter localisation using landmark prediction model
- Baarath Kunjuni (FYP 2015): Vehicle platooning strategy using PID controller