
My research interest is in, but not limited to, Simultaneous Localization and Mapping (SLAM) of Mobile Robot. In particular, I am interested in analysing the behaviour of the covariance matrix of the estimation of mobile robot’s position by means of several estimation methods (Kalman filter, H∞ filter, Particle filter, and so on).
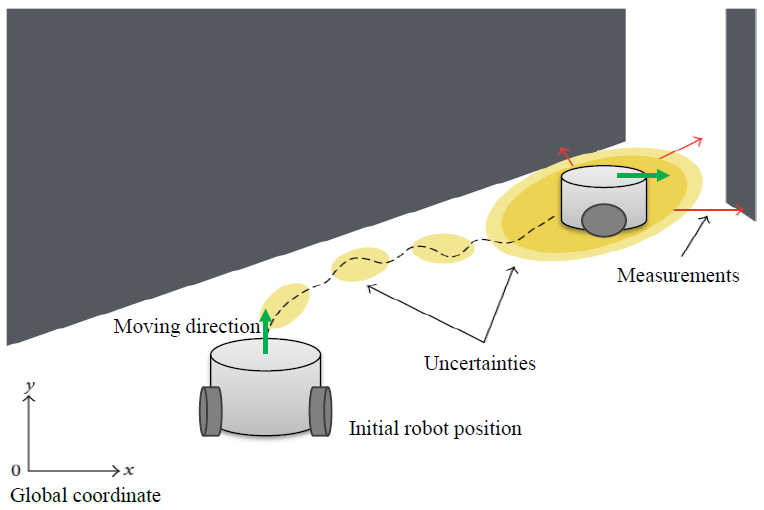
SLAM of Mobile Robot
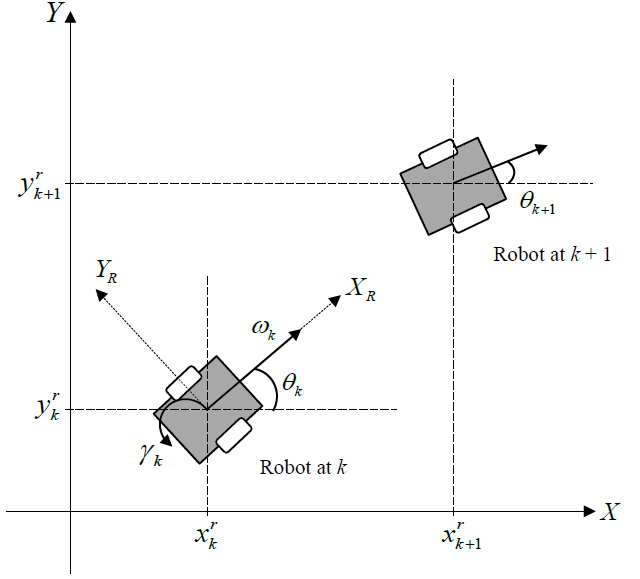
Process Model

SLAM with Kalman Filter