Emerging of new technology such as Automated Guided Vehicle (AGV) and Remotely Controlled Vehicle (RCV) as well as Internet of Things (IoT) demand, the forklift system has potential to be designed with semi-autonomous or maybe fully autonomous configuration for both long and short distance operations. However, most of the AGVs/RCVs in the market are available for the certain standard size of the area of work in which unable to meet the user requirement for the case of confine and narrow area deployment. This project was initiated by our collaborator Vacuumschmelze (M) Sdn. Bhd., to simplify and automate their heavy spool pick-and-place process from confined inventory with 170cm x 270cm square, to the testing room repeatably not more than 20 minutes approximately as shown in Figure 1 for the overall flow process and as shown as Figure 2 for top view of the site process.

Addie Irawan
Faculty of Electrical & Electronics Engineering, Universiti Malaysia Pahang
Automated Guided Vehicle
Mini Heavy Loaded Forklift Autonomous Guided Vehicle (MHeLFAGV)
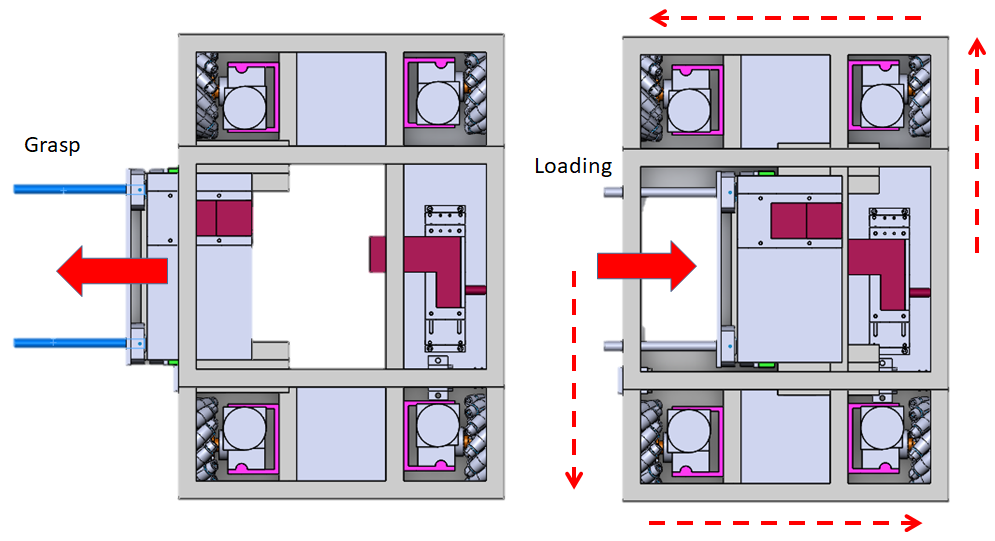
Figure 4: Example of MHeLFAGV Forklifter swallow operation
Mini Heavy Loaded Forklift Autonomous Guided Vehicle (MHeLFAGV) [patent applied] as shown in Figure 3 was started developed in mid 2014, is designed with RCV concept with swallow mechanism to handling between 20-200kg payloads at the confine warehouse. MHeLFAGV is designed to suit with the 170cm x 270cm square area that configured with tri-tips and 2-axis of fork-lifter to pick-and-place and extend-retract a spool item operation respectively. The omnidirectional mechanism was chosen by configuring four industrial-scale mecanum wheels as
MHeLFAGV’s wheels. Moreover, this customized fork-loader unit also equipped with absorber unit to deal with any uneven terrain that essential for mecanum wheel and its movement topology.
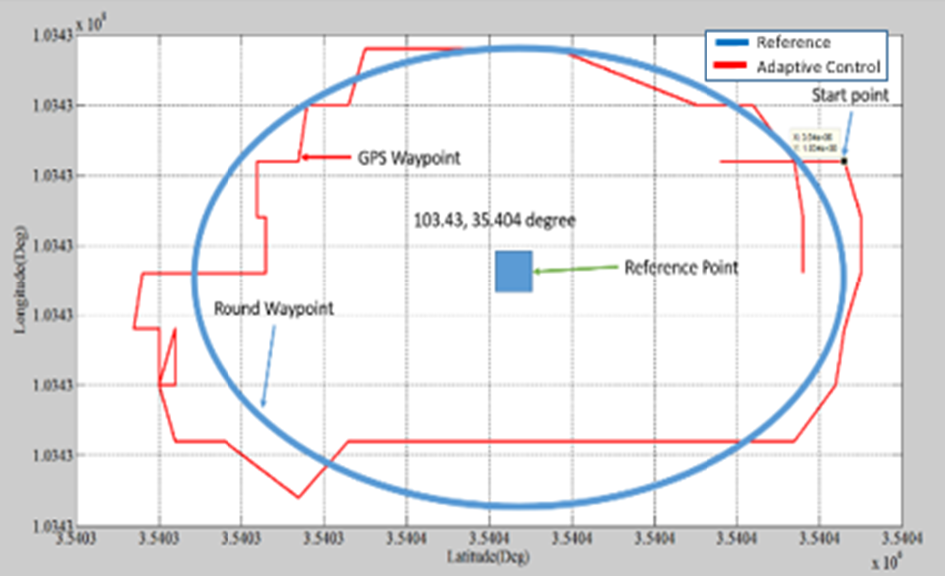
Figure 7: Sample of GPS reading for turn around movement test on MHeLFAGV
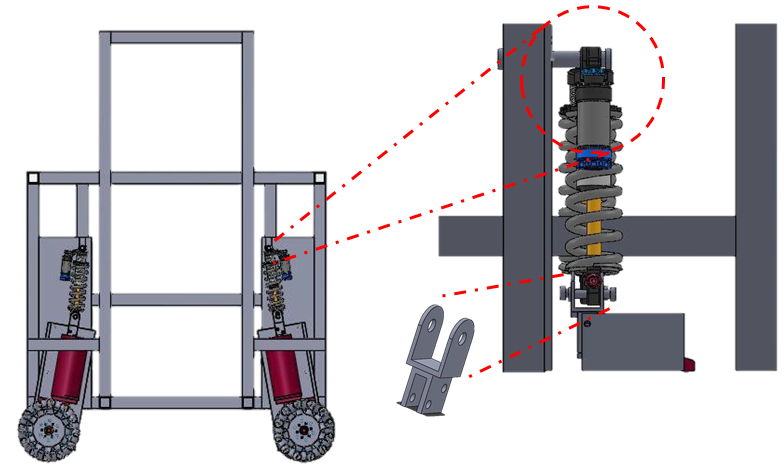
Figure 8: Additional absorbance/suspension

Figure 9: Wireless remote control with wireless video viewer
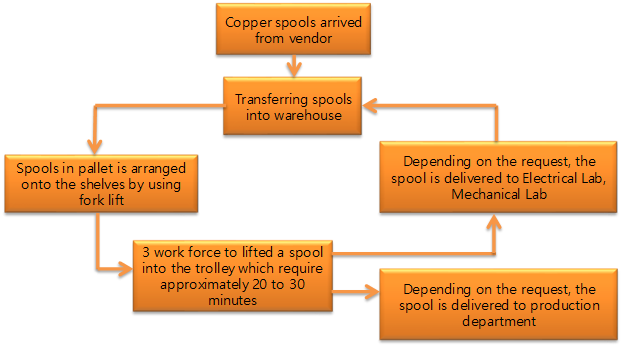
Figure 1: Pick-and-place heavy spool process
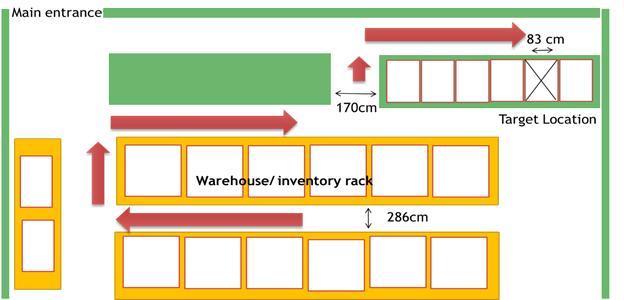
Figure 2: Top view of inventory warehouse with confine area and flow of heavy spool pick-and-place process
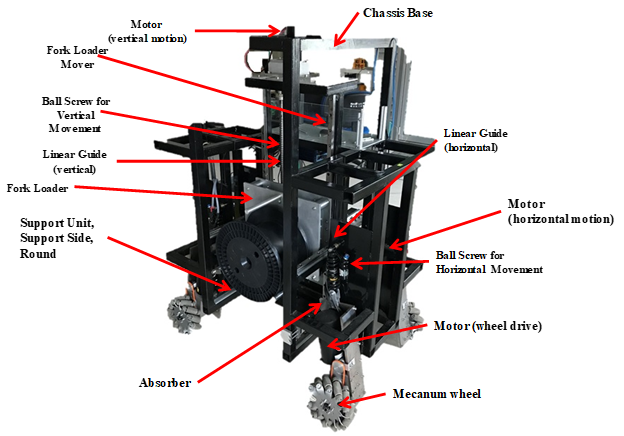
Figure 3: Overview of MHeLFAGV unit (First phase design)
Wireless remote controls and mainly with two stages of controller boards; Board 1 and Board 2 was developed as a controller and monitoring unit of the system. The overview of MHeLFAGV control architure as shown in Figure 6. The intensive tests and experiments were done by operating both indoor and outdoor operation on MHeLFAGV. The structure model was verified with some finite element analyses and the motion algorithms in which were validated in the wide terrain area with Global Positioning System (GPS) as its waypoint tracer as shown as sample in Figure 7.
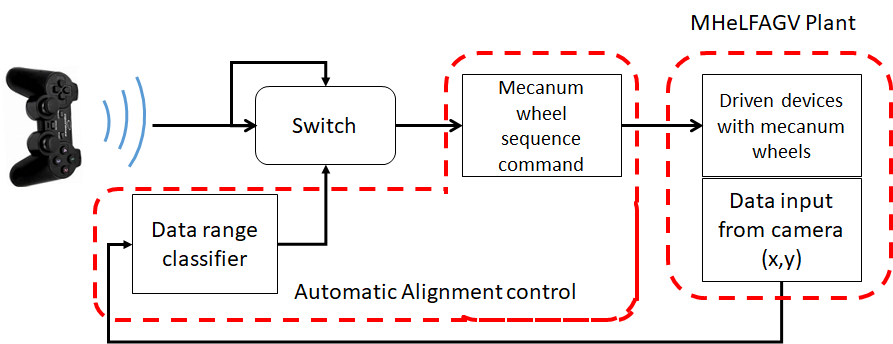
Figure 6: Overview on MHeLFAGV Control System Architecture
For second stage of progress, MHeLFAGV has been enhanced with additional suspension to deal with the uneven ground surfaces. According to the first trial on site, some area of the floor in targeted warehouse have uneven surfaces that disturbing vehicle motion. Moreover, this additional part consider to increase the height of the vehicle so that it can deal with any rack of cartons in the inventory site. In addition, remote control with wireless video viewer also added for user to view the targeted spool to be grasped as shown in Figure 9. This remote system allow user to align the fork to be nearly to the target spool so that the automatic alignment process time can be reduce. It also as emergency tool if the automatic grasping system is malfunction.
Related Publications:
- A. Irawan, A. R. Razali, and S. S. N. Ali, “MHeLFAGV: A Remotely Controlled Mini Fork-loader for Confined Area Operation,” Progress in Fluid Power, Mechanisations and Mechatronics, vol. 1, pp. 23-49, September 2018.
- A. Irawan, M. A. Yaacob, F. A. Azman, M. R. Daud, A. R. Razali, and S. N. S. Ali, “Vision-based Alignment Control for Mini Forklift System in Confine Area Operation,” in 2018 International Symposium on Agent, Multi-Agent Systems and Robotics (ISAMSR), 2018, pp. 1-6.
- F. A. Azman, M. R. Daud, A. I. Mohamed, A. Irawan, R. M. Taufika, and R. Ismail, “Vision-based object’s shape determination for robot alignment,” Journal of Telecommunication, Electronic and Computer Engineering, vol. 10, pp. 111-115, 2018.
- W. M. N. W. Lezaini, A. Irawan, and S. N. S. Ali, “Forkloader Position Control for A Mini Heavy Loaded Vehicle using Fuzzy Logic-Antiwindup Control,” TELKOMNIKA (Telecommunication Computing Electronics and Control), vol. 15, pp. 739-745, 2017.
- N. Adam, M. Aiman, W. M. Nafis, A. Irawan, M. Muaz, M. Hafiz, et al., “Omnidirectional configuration and control approach on mini heavy loaded forklift autonomous guided vehicle,” in MATEC Web Conf., 2017, p. 01077.