Research Interest
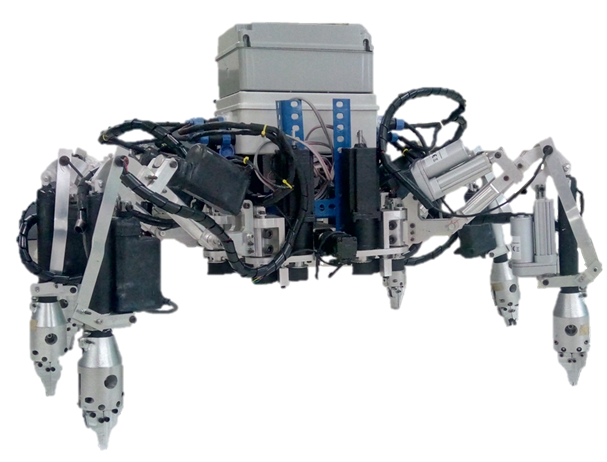
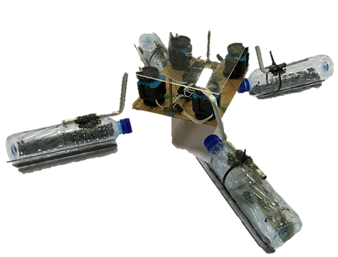
Multi-legged and Multi-limbed Robots
- Reconfigurable and Flexible Legged robot
- Underactuated and parallel actuation arm/leg
- Bio-inspired and hybrid bio-mimetic robot mechanism
Motion Control & Automation Systems
- Force/Impedance Control
- Integrated Intelligent Control.
- Vehicle Dynamics
- Visual Servoing for the autonomous system.
- Multi-processing systems.
- Multi-motor drive systems.
- Dynamics modeling for mechatronics system
- Computer control for manufacturing system
Underwater Systems (Lake, River, Drainage, Irrigation, Coastal & Sea Application)
- Robotics systems for underwater application
- Inter-communication for land-to-underwater communication
- Acoustics underwater propagation